Can we investigate the performance of a hydraulic excavator before any parts are manufactured? Read on to find out.
In this post, we give a rundown of a typical approach to product development with model-based systems engineering (MBSE).
Our objective is to assess the impact the digging arm geometry has on the overall performance of the excavator. For the system simulation, we used Simcenter Amesim because it is capable of simulating the entire multiphysics system in a single model.
System simulation
A typical hydraulic excavator has many subsystems. These include hydraulics, mechanical structure, and a prime mover (either an internal combustion engine or an electric motor).
Simcenter Amesim offers off-the-shelf libraries for various physical domains, which help to reduce the amount of physics modelling needed to begin the design process.
In this case, for the system modelling of a hydraulic excavator, several of these libraires are useful: Hydraulic, 1D and 3D Mechanical, IFP Drive (Fig. 1).
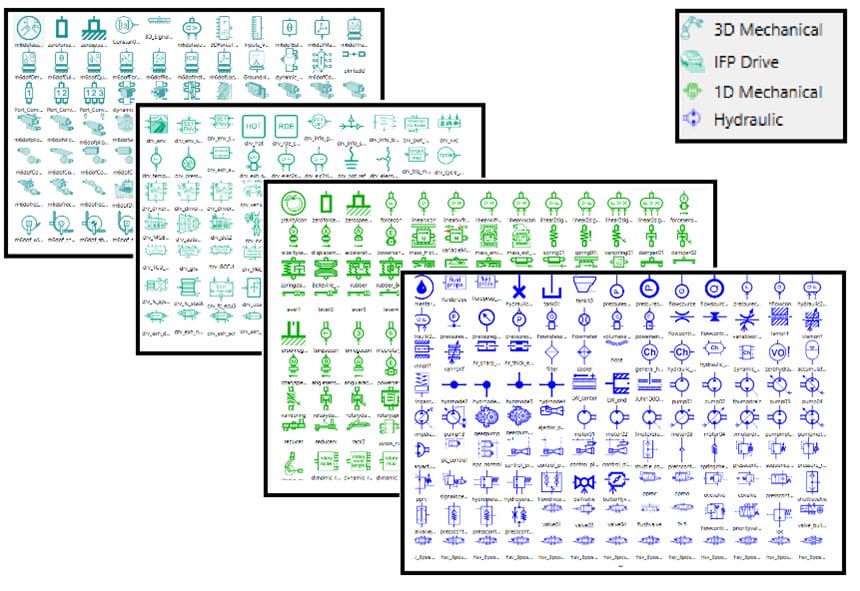
Fig. 1 Content of Simcenter Amesim Libraries: Hydraulic, 1D and 3D Mechanical, IFP Drive.
Design considerations
The primary purpose of an excavator is digging. Its performance is expressed by productivity and fuel consumption – and the digging arm design has a great impact on both.
The digging arm geometry, which is defined by pin positions, deserves careful consideration
The hydraulic excavator’s digging arm and pins are shown below (Fig. 2).
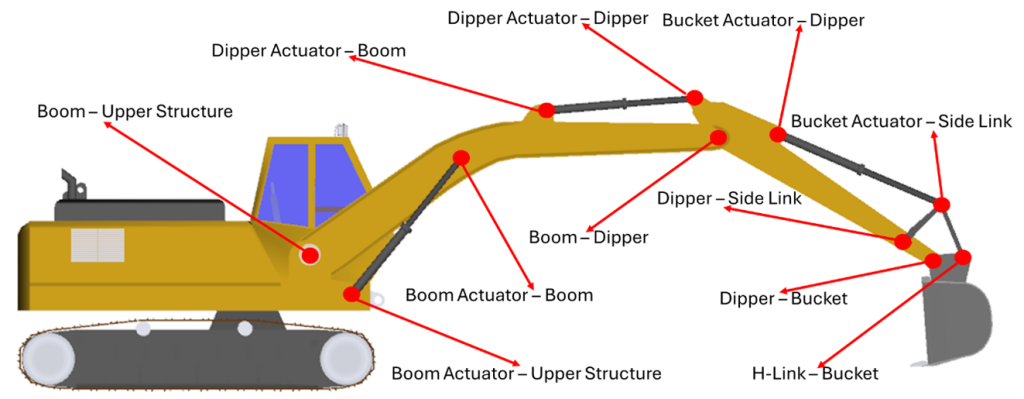
Fig. 2 Hydraulic excavator’s digging arm pins.
Simcenter Amesim is the perfect simulation tool for complex systems. Figure 3 shows the Simcenter Amesim model of a hydraulic excavator used to investigate the pin location’s influence on the overall excavator performance: volume of soil moved, digging force, actuators forces, hydraulic flows and pressures, prime mover power, fuel consumption.
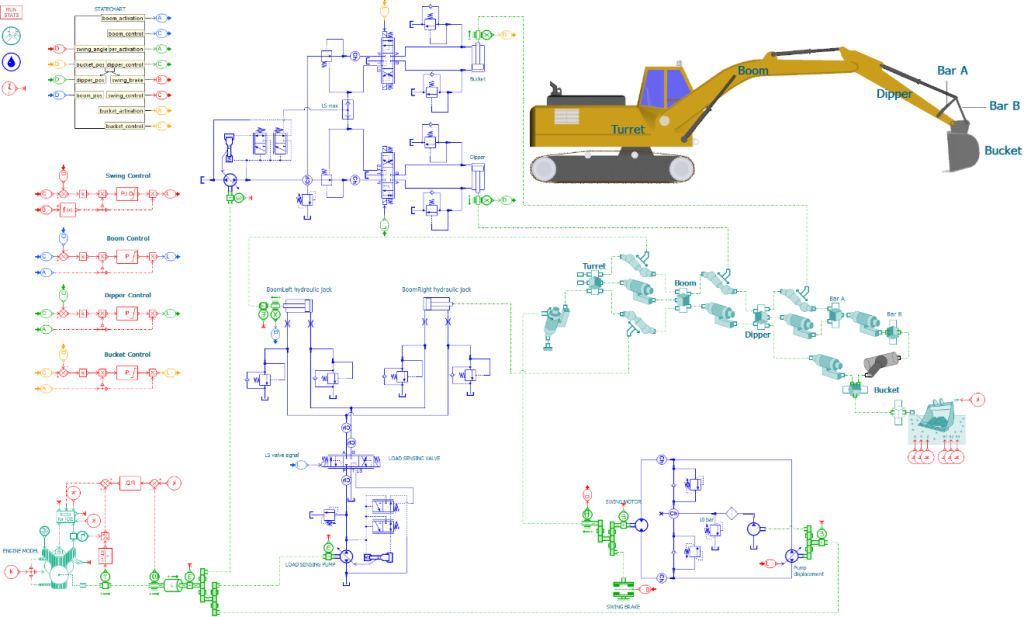
Fig. 3 Simcenter Amesim model of a hydraulic excavator.
In this study, we compare two boom geometries: Initial Geometry A and Final Geometry B. The only difference between these two is the location of the Boom Actuator – Boom pin, as shown in figures 4 and 5.
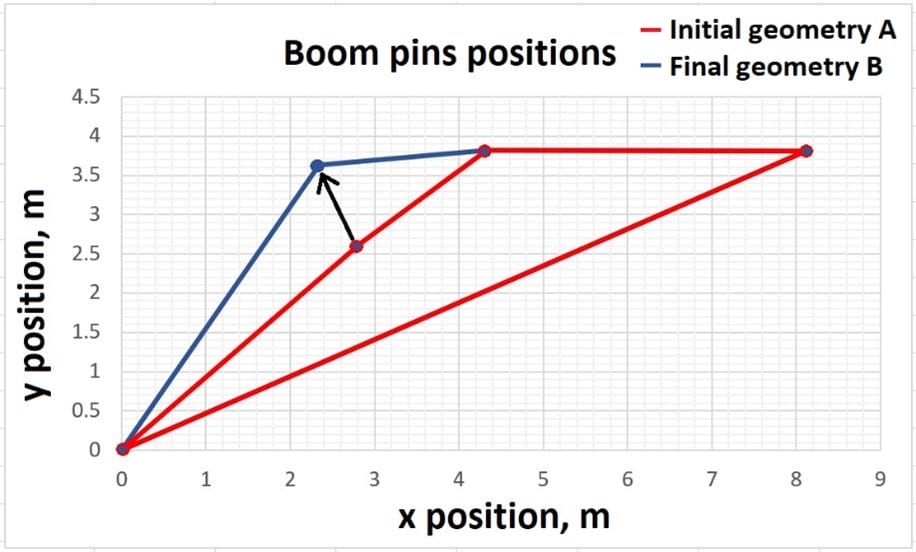
Fig. 4 Simcenter Amesim model of a hydraulic excavator.
As shown in figure 5, although the digging arm position is the same, the boom actuator displacement is higher. Therefore, changing the digging arm geometry has an impact on the required actuator stroke.
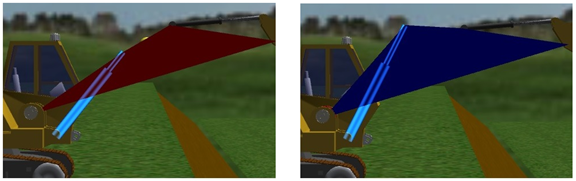
Fig. 5 Simcenter Amesim Animation feature showing both boom geometries.
Performance analysis
We used Simcenter Amesim Study Manager to define two sets of parameters for the Boom Actuator – Boom pin position (Figure 6).
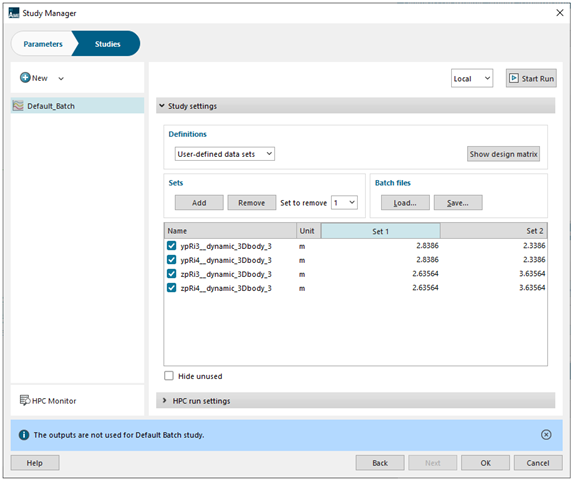
Fig. 6 Study Manager parameters settings for the boom actuator to boom pin.
To obtain a meaningful comparison of the excavator’s performance with two different geometries, we decided to keep productivity the same and to compare fuel consumption.
To ensure that productivity stays the same for both digging arm geometries, the excavator control is defined in a such way that the bucket trajectories for both geometries are as close to each other as possible (Figure 7). Figure 8 shows that indeed the volume moved in both cases is nearly identical.
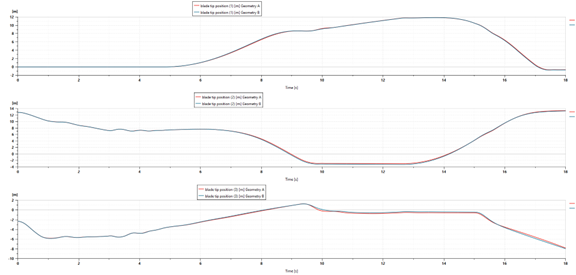
Fig. 7 Bucket x,y,z positions for Geometry A (red lines) and Geometry B (blue lines).
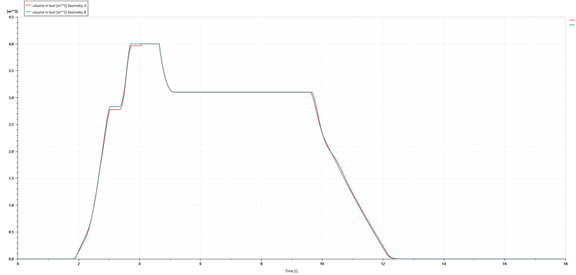
Fig. 8 Volume in the bucket for Geometry A (red lines) and Geometry B (blue lines).
Engine power demand and fuel consumption analysis clearly demonstrate that for Geometry B, while moving the boom up, the engine provides less power. As a result, the fuel consumption is lower, too (Figure 9).
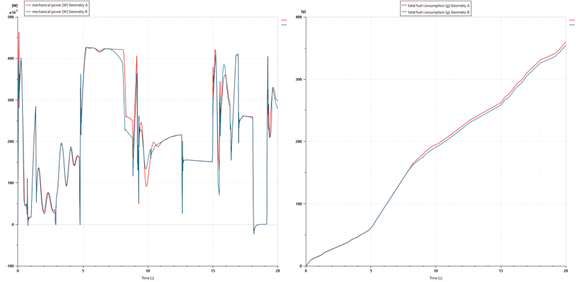
Fig. 9 Engine power and fuel consumption for Geometry A (red lines) and Geometry B (blue lines).
As previously mentioned, changing the digging arm geometry also influences the actuator force. Figure 10 presents the boom actuator force trace for both geometries.
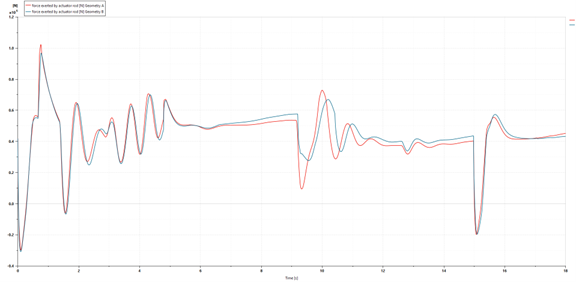
Fig. 10 Boom actuator force for Geometry A (red lines) and Geometry B (blue lines).
MBSE and excavator performance investigation
Using an MBSE process, we were able to:
- Achieve an in-depth understanding of the excavator’s performance before any CAD design became available
- Obtain virtual benchmarking of various machine configurations that enabled us to optimize the excavator’s subsystems and explore different designs
Ready to bring similar benefits into your product development processes?
Contact a Maya HTT expert today.
Explore our simulation services
Check out our how-to videos