Les véhicules à guidage automatique (VGA) et les robots mobiles autonomes (RMA) sont les plus souvent utilisés dans les usines, les entrepôts et d’autres environnements industriels pour la manutention du matériel (à la manière des chariots élévateurs à fourche), et en particulier pour les tâches très répétitives ou le transport des charges lourdes.
À mesure que la technologie progresse, l’utilisation des VGA s’étend au-delà du secteur de la logistique.
Les défis de la conception des VGA et des RMA.
L’un des défis de la conception des VGA consiste à trouver un équilibre entre le besoin en matière de vitesse et le besoin en matière de stabilité. Les VGA doivent pouvoir se déplacer rapidement dans un entrepôt sans se renverser.
Les RMA, eux, doivent suivre de manière fiable un chemin défini. Il s’agit d’une autre complication, car les espaces où ils fonctionnent sont souvent partagés avec des personnes. La sécurité sur le lieu de travail est toujours une priorité, et le contrôleur de suivi de trajectoire a donc la tâche importante d’empêcher les collisions et autres accidents impliquant les VGA.

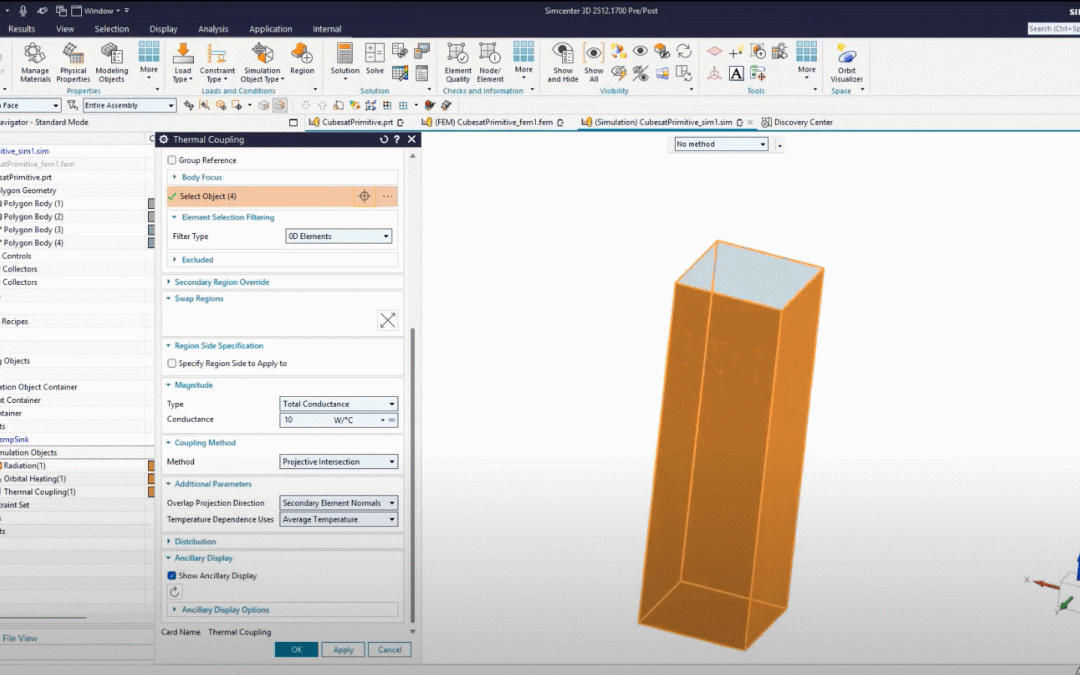
Modélisation d’un RMA à trois roues sur une trajectoire spécifique
Nous avons utilisé Simcenter Amesim pour créer un modèle de système du châssis d’un RMA à trois roues suivant une trajectoire spécifique et valider le contrôleur de suivi de trajectoire.
Ce type de modèle peut être utilisé pour :
- Définir l’architecture des châssis;
- Étudier la stabilité de diverses accélérations et courbes de trajectoire; et
- Mettre en service virtuellement le contrôleur.
Améliorer la conception des VGA et des RMA grâce à la simulation des systèmes
Les informations présentées dans ce document peuvent aider les fabricants et les opérateurs d’équipement à comprendre :
- Comment l’ingénierie peut réduire le temps et le coût de développement des systèmes de VGA et de RMA;
- Comment surmonter les limitations en matière de vitesse, d’autoguidage et de manœuvre sans sacrifier la stabilité; et
- Comment équilibrer les attributs de performance du véhicule tels que la vitesse, la charge, la stabilité, etc.
Téléchargez le document (disponible seulement en anglais) pour lire les détails de l’étude et en savoir davantage sur les performances du modèle.